Octanis 1 était notre première mission ayant pour but de concevoir un rover autonome et abordable pour les régions polaires ou les zones de glacier. Durant cette première itération, le rover a été spécialisé pour être adapté aux régions côtières de l'Antarctique et ses conditions climatiques spécifiques. Une fois que le rover aura fait ses preuves en Antarctique, nous prévoyons de lancer un kit à l'attention des curieux qui voudraient se lancer dans leur propre mission d'exploration.
Soutien Financier Sponsorisé par Panneaux solaires Sponsorisés par
Panneaux solaires Sponsorisés par
 Matériel LoRa Sponsorisé par
Matériel LoRa Sponsorisé par
 Sytème de navigation GPS Sponsorisé par
Sytème de navigation GPS Sponsorisé par

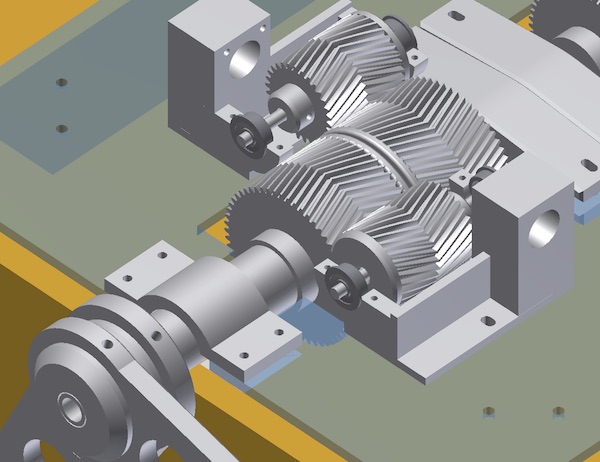
 Moteurs d'attitude Sponsorisés par
Moteurs d'attitude Sponsorisés par
 Matériel de traitement d'images Sponsorisé par
Matériel de traitement d'images Sponsorisé par

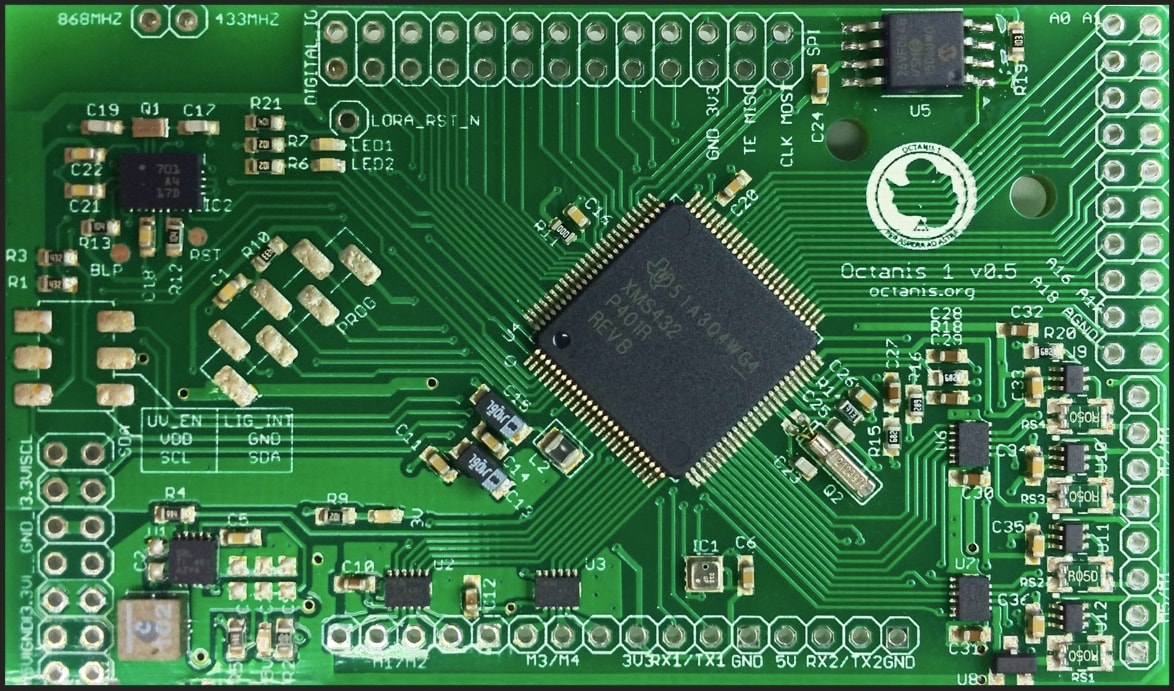
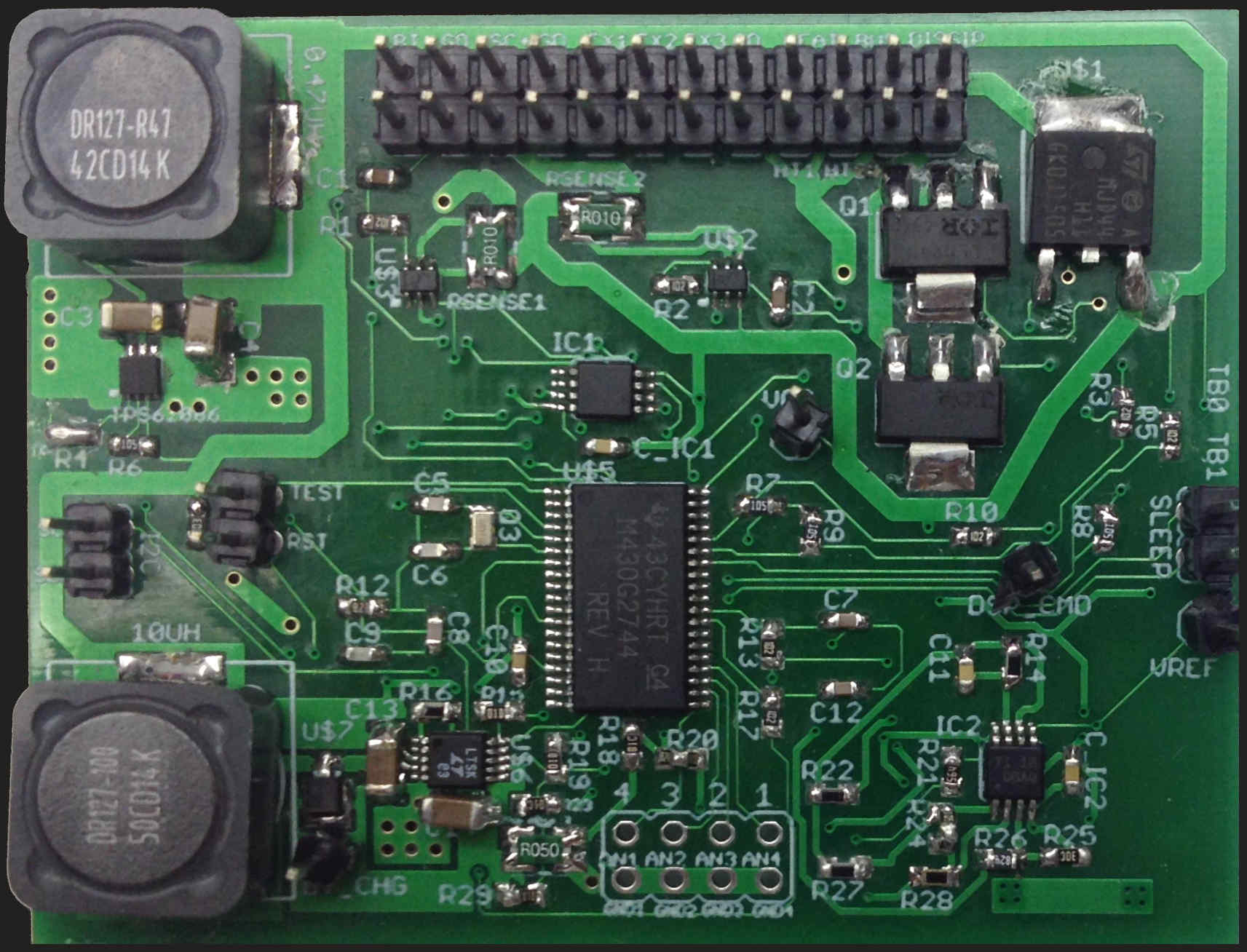
Des composants spécialisés concentrés sur une petite carte forment l'unité centrale du rover. Ce petit monstre de puissance contrôle tout, de la navigation à la communication avec le Contrôle de Mission. Conçu pour consommer très peu d'énergie, cette carte potentialise de futures missions du rover durant lesquelles il devra pouvoir survivre dans l'obscurité totale, sur ses seules batteries pendant la durée de l'hiver Antarctique. Déplacez votre curseur sur l'image pour plus de détails.
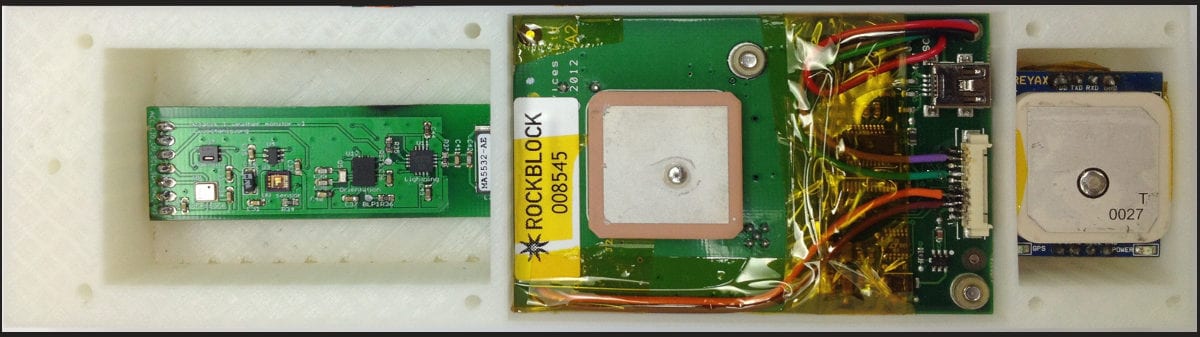
Le rover est capbable d'utiliser trois canaux de communication différents: le Bluetooth pour le contrôle de proximité, le LoRaWAN pour un contrôle longue portée d'au moins 15km et un plus extravagant modem satellite RockBLOCK™. Ce dernier permet une communication bi-directionnelle, partout dans le monde, d'un pôle à l'autre et permet au rover d'utiliser le réseau satellite Iridium. Les données envoyées par les rover via LoRaWAN et le modem satellite peuvent être consultées en ligne via une plateforme de suivi en continu.
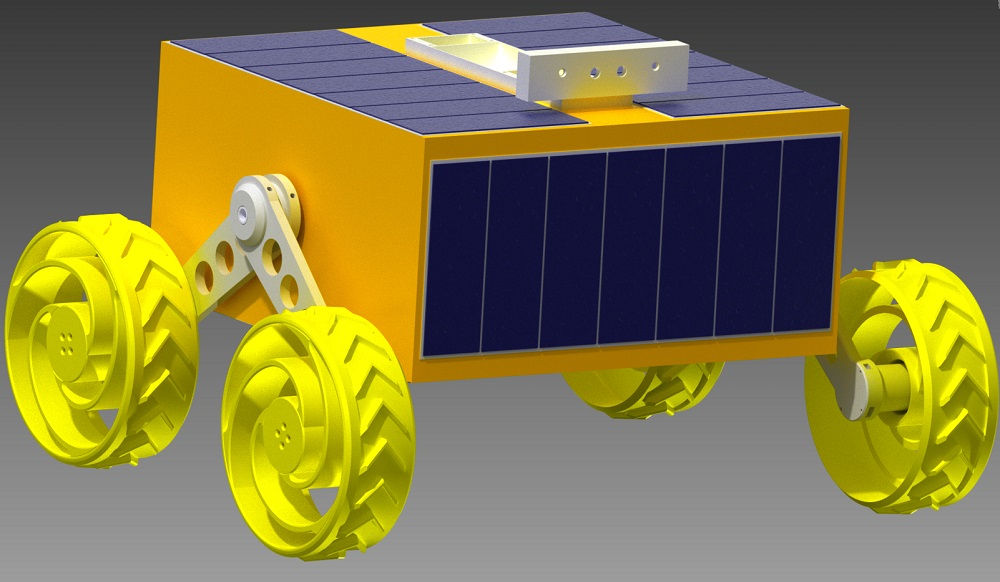
Grâce aux panneaux solaires à haut rendement SunPower™, le rover capture toute l'énergie solaire possible et la stocke dans ses batteries lithium-ion. Tout comme les formes de vie ont un système métabolique qui contrôle l'état de leur corps, notre rover possède un sous système de gestion de l'alimentation appelé EPS. L'EPS suit en continu l'état des batteries et les recharge quand c'est possible. L'énergie solaire excédentaire est utilisée pour chauffer l'intérieur du rover et maintient tous les systèmes dans un range de température qui leur convient. Dans le cas où le programme du rover venait à crasher, l'EPS prend la main et redémarre le système.
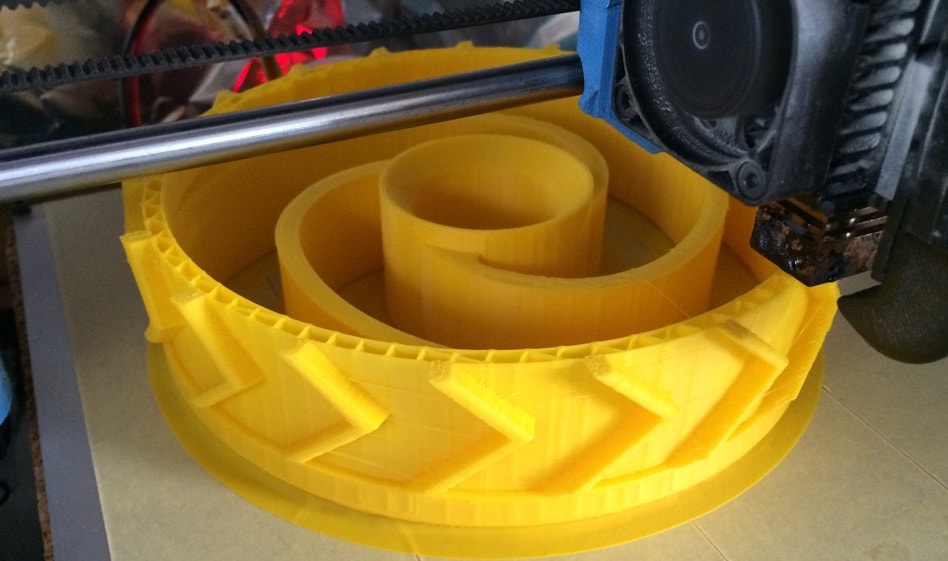
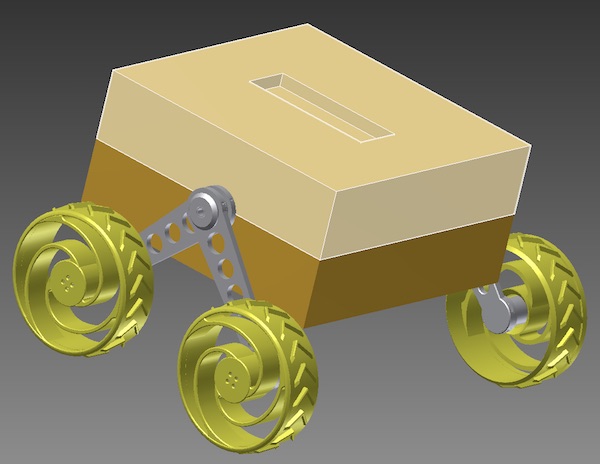
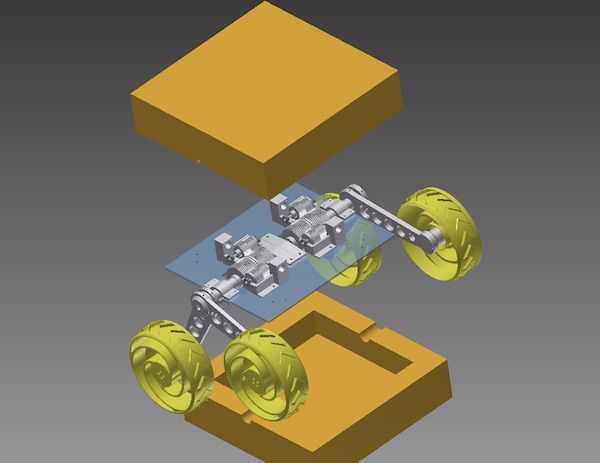
Tout le monde peut fabriquer sa propre mouture du rover Octanis 1 pour une mission dédiée. Le rover est constitué essentiellement de parts disponibles dans le commerce à un prix abordable. Quelques éléments spécifiques comme les roues ou les bras peuvent être entièrement imprimés en 3D grâce à des imprimantes à PLA/ABS, disponibles dans votre Hackerspace le plus proche. C'est aussi simple que d'insérer une clé USB et de lancer une impression!
Le rover est universel et son programme peut être rapidement modifié pour lui faire faire ce que vous voulez. Et vous n'avez pas besoin de notre permission pour ça. Pas besoin d'outils de développement coûteux ou de connaître la programmation assembleur. Le rover est aussi abordable comme tous ces éléments sont ou imprimés en 3D en ABS, ou en mousse bon marché et constitués de composants mécaniques communs. L'électronique est dans le même ordre de prix qu'un Kit Arduino et est détaillée ci-après. Vous êtes bien-entendu libre de lui attacher n'importe quel type de charge utile, comme un appareil de séquençage ADN ou un réseau de caméra pour repérer les météorites. Vous pouvez interfacer vos modules d'extension au rover via USB, I2C ou UART.
Davantage de détails sur les spécifications techniques et d'autres informations sur le rover sont disponibles sur notre page wiki. Le rover est open source et sous licence MIT. Vous pouvez trouver le code software et les plans CAD sur notre GitHub. Merci de nous informer si vous utilisez ou modifiez notre travail. Nous serons heureux d'entendre votre histoire et vos suggestions!