Octanis 1 is our first mission to build a low-cost autonomous rover for polar, snow or ice covered regions. In this first iteration we will be specialising the rover for the coastal regions of Antarctica and its specific weather conditions. After the rover will prove itself in Antarctica, we plan to release a rover kit aimed at curious minds wanting to do their own exploratory missions.
Financial Support By Glacier Access Sponsored By
Glacier Access Sponsored By
 Solar Panels Sponsored By
Solar Panels Sponsored By
 LoRa Hardware Sponsored By
LoRa Hardware Sponsored By

 Image Processing Hardware Sponsored By
Image Processing Hardware Sponsored By
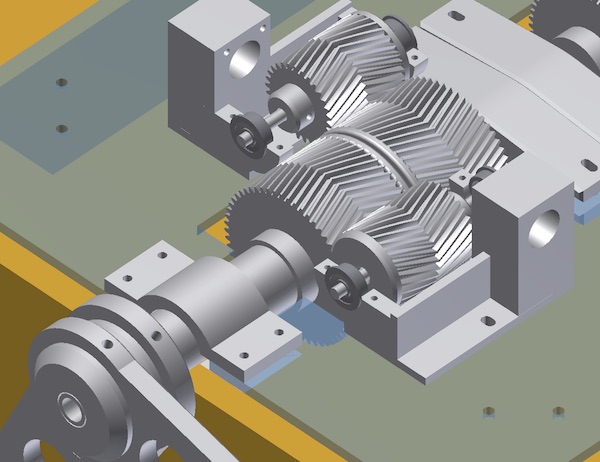
 Strut Motors Sponsored By
Strut Motors Sponsored By

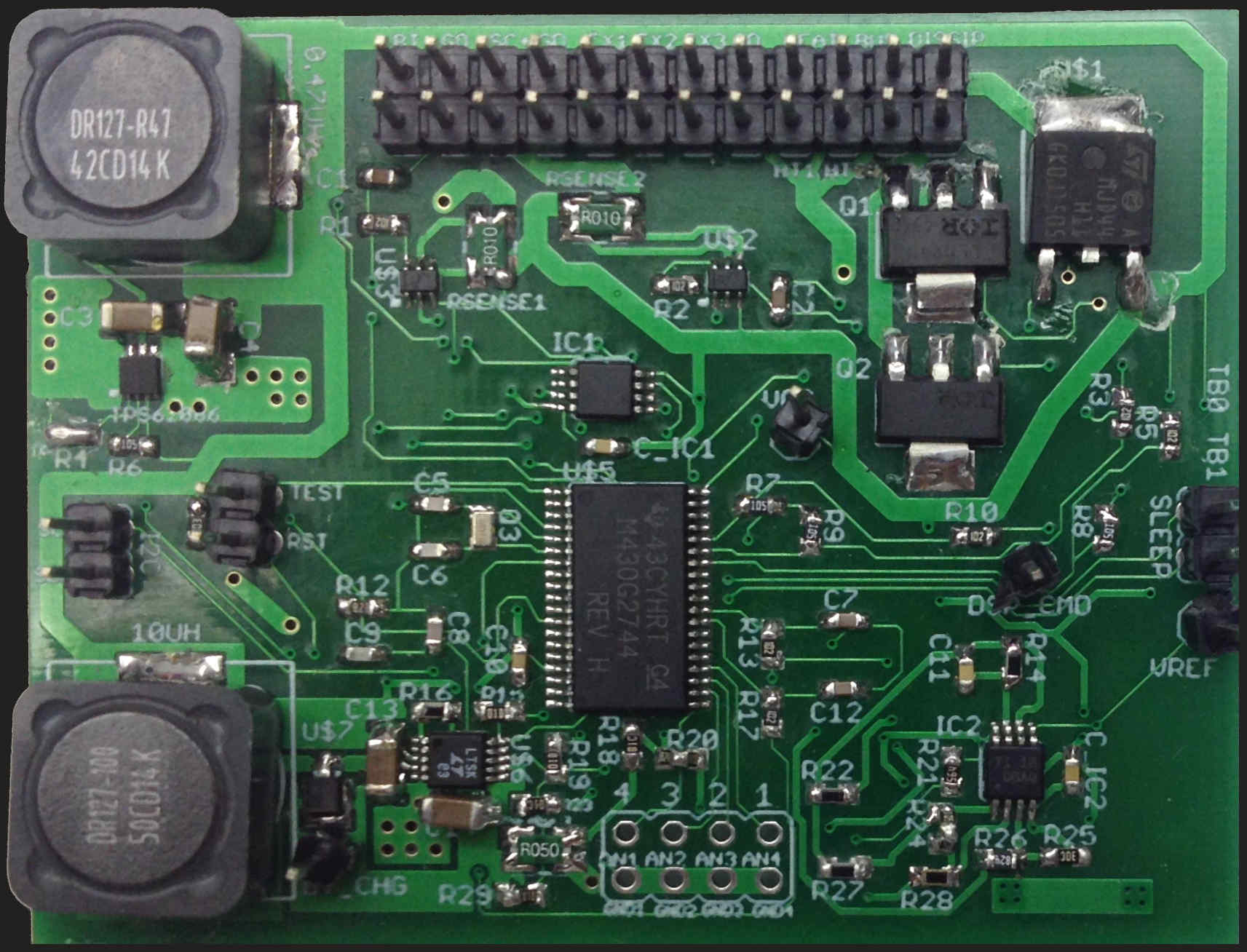
Specialised devices on one tiny board form the rovers main computer. This little powerhouse controls everthing from driving to communicating with Mission Control. Designed to consume very little power, this board enables future rover missions requiring the rover to survive in complete darkness for up to 6 months - running only on battery. Move your mouse over the picture.
Get your own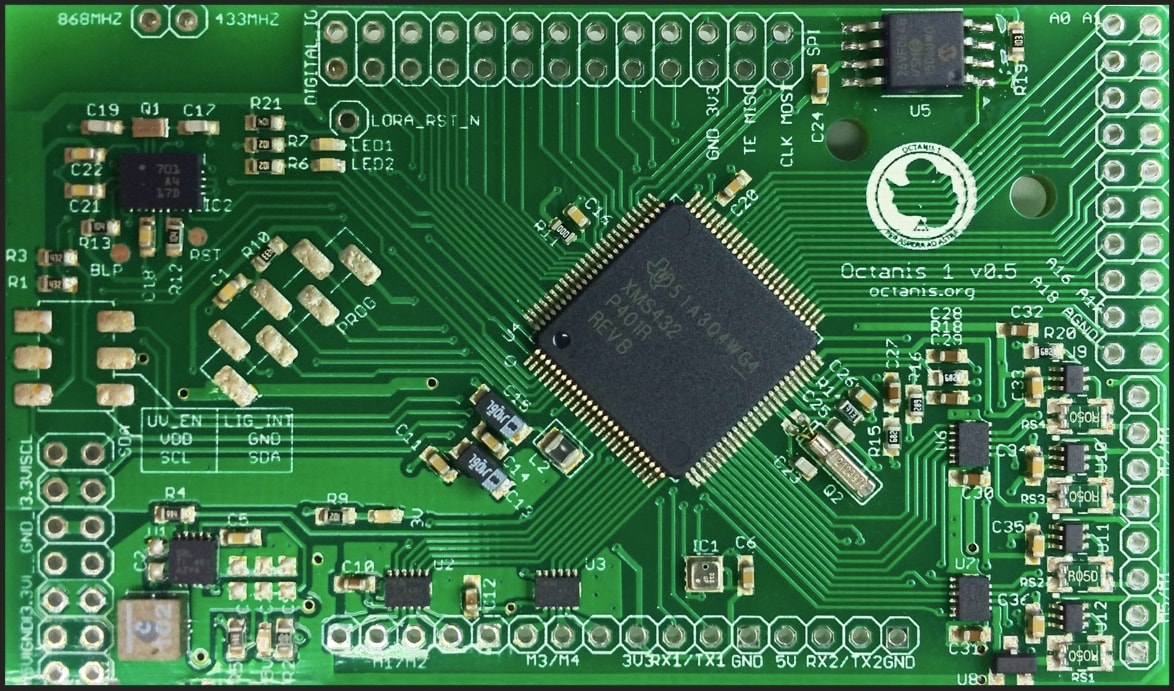
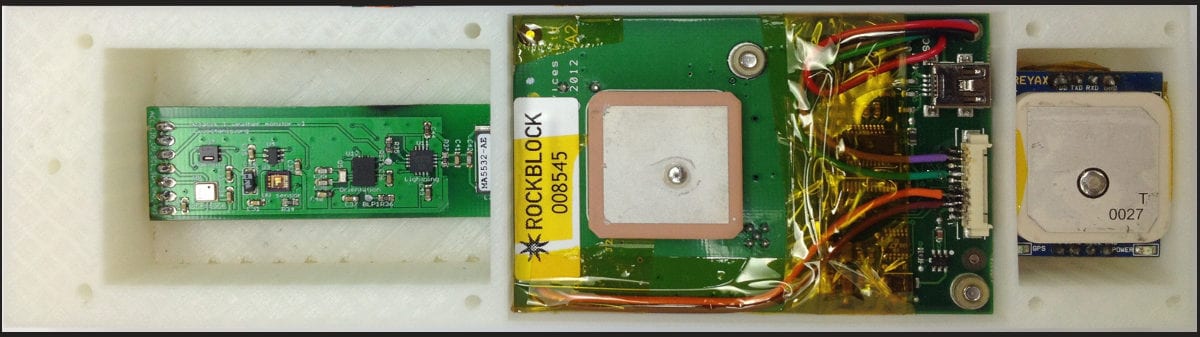
Rover is capable of using three different communications channels: Bluetooth for close proximity control, LoRaWAN for a large 15km range and a more extravagant Satellite Modem called RockBLOCK™. The latter enables worldwide, pole-to-pole, two-way communications with the rover using the Iridium Network. LoRaWAN and Satellite Modem data sent by the rover can be accessed on a web monitoring platform.
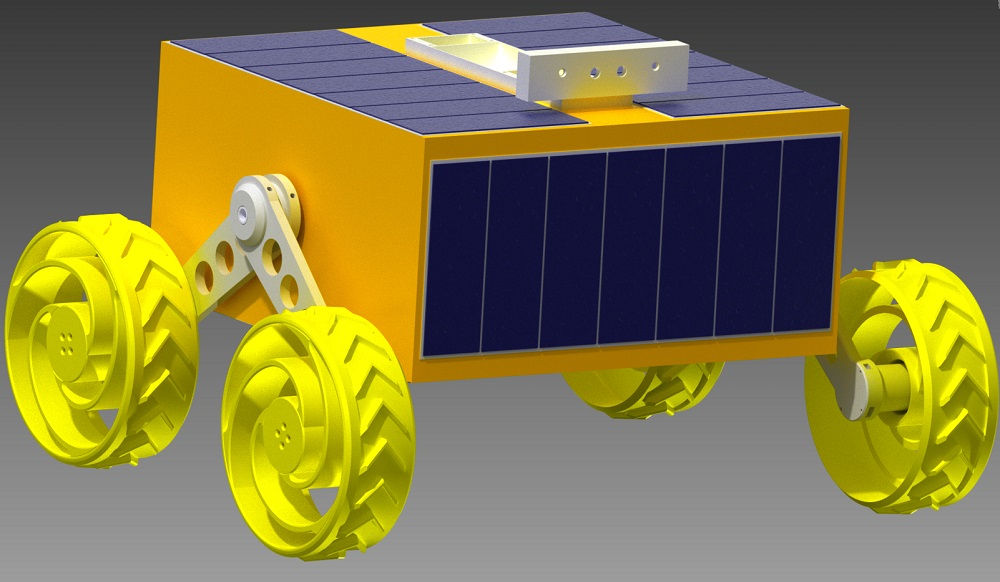
Using highly efficient SunPower™ solar cells, the rover takes up all the sunshine it can get and stores the solar energy in its internal lithium-ion battery pack. Like living organisms who have a basic metabolic system controlling body state, our rover has a dedicated energy subsystem called EPS. The EPS keeps track of the batteries and recharges when possible. Excess solar energy is used to heat the rovers body and keep all the systems at their preferred working temperatures. And in case the rovers software unexpectedly trips up and crashes, the EPS steps in to reboot the system.
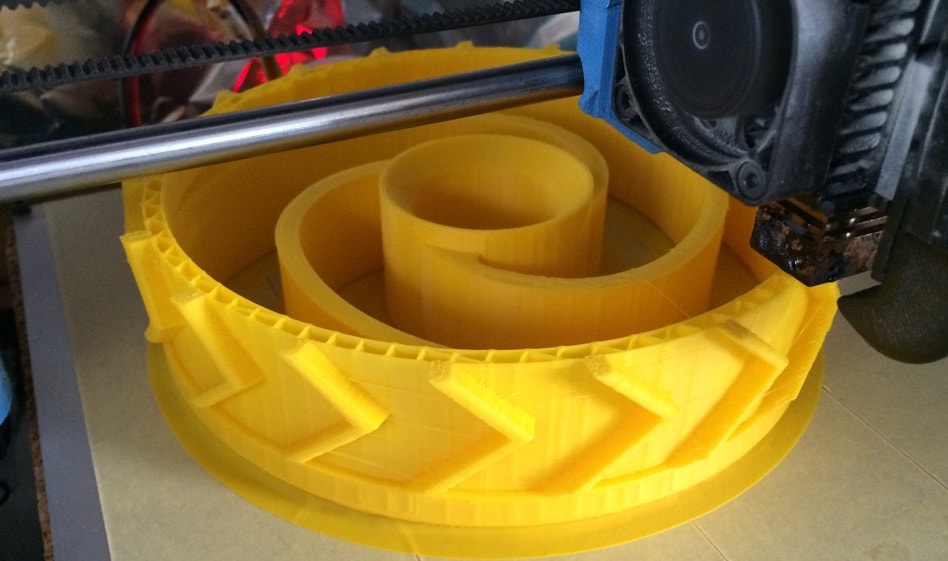
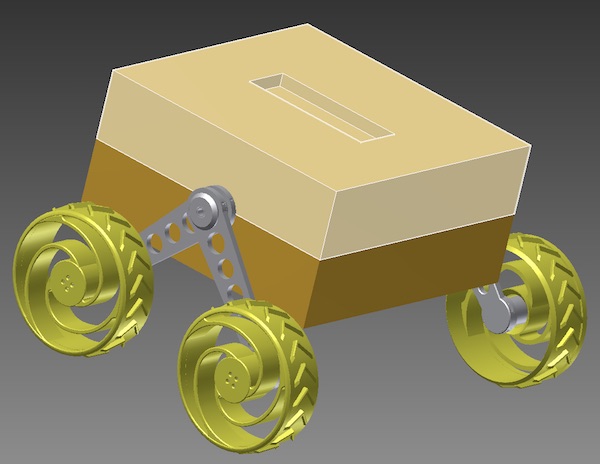
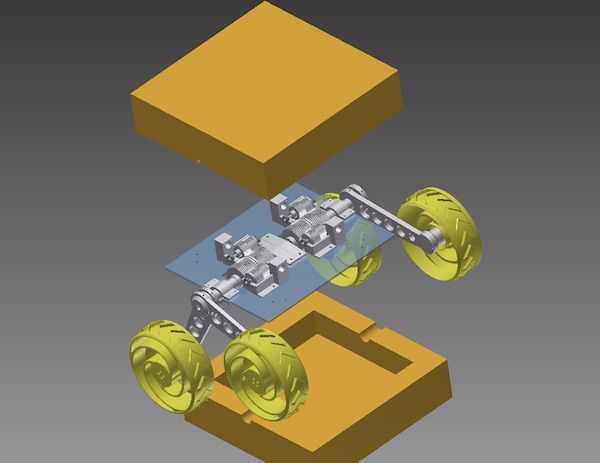
Anyone can make their own incarnation of the Octanis 1 rover for their own missions and expeditions. The rover is built using normal commercial parts available to everyone at an affordable price. Special parts like wheels or struts can be entirely 3D printed using additive PLA/ABS printers, available at your nearest Hackerspace. It's as easy as inserting a USB stick and hitting print!
The rover is universal as it's software can be changed in a short time to do whatever you want. And you don't need our permission for that. No need for expensive development tools or knowledge of low level assembly. The rover is also affordable as all parts are either 3D printed ABS, made of cheap foam or off-the-shelf mechanics. The electronics are about as expensive as an Arduino Kit and are detailed below. Of course you have the freedom of attaching any type of payload, such as a DNA sequencing device or a meteorite seeking camera array. They can interface over USB, I2C or UART.
More details on the technical specifications and other information on the rover are on our wiki. The rover is open source and licensed under the MIT License. You can find software code and CAD drawings on GitHub. Please tell us if you use or modify our work. We love hearing your stories and suggestions!